ソーラーパネル下での協生農法に実装可能な農業用ロボットとその高効率な遠隔操縦システムを早大が新開発
地球生態系の回復、気候変動防止に寄与する食料生産、カーボンニュートラル社会の実現に貢献
発表のポイント
砂漠化地域など従来の農業が難しい土地でも実施可能な「協生農法」に関心が高まっていますが、既存の農業機械で協生農法に必要な複数作業を連続的に実行できる農業ロボットはこれまで開発されていませんでした。
ソーラーパネル下で植物が混生密生する農地環境において移動および種植え・雑草剪定・収穫の3作業を実行するロボットと、その遠隔操作が可能な操縦システムを新たに開発しました。新システムは、従来比、動作時間:49%削減、障害物との干渉率:50%削減を達成しました。
耕作放棄地や砂漠化地域でもロボットの支援により農作業が実現できる協生農法を地球規模で推進することで、SDGsの目標にも通じる地球生態系の回復、気候変動防止に寄与する食料生産、さらにカーボンニュートラル社会の実現に貢献することが期待されています。

早稲田大学(東京都新宿区、総長:田中愛治、以下、早大)理工学術院総合研究所の大谷拓也(おおたにたくや)次席研究員ならびに同大理工学術院の高西淳夫(たかにしあつお)教授らの研究グループは、サステナジー株式会社(東京都渋谷区、代表:三木浩、以下、サステナジー)との産学連携・共同研究により、ソーラーパネル下で複数種の植物が混生密生する農地環境において移動および種植え・雑草剪定・収穫の3作業が可能なロボットと、その遠隔作業を実現する新たな操縦システムを開発しました。株式会社ソニーコンピュータサイエンス研究所(以下、ソニーCSL)の舩橋真俊シニアリサーチャーが提唱する、砂漠化地域、土壌が劣化した農地など従来の農業が難しい土地でも実施可能な協生農法を、本研究開発によりソーラーパネル下で大規模に行うことができれば、気候変動対策としての緑化・再生可能エネルギー生産、加えて食料生産も進められることが期待されています。
本研究成果はスイス・バーゼルに本部を置くオープンアクセス専門出版社であるMDPI社発行の『Agriculture』誌に2022年12月21日(水)に掲載されました。
論文名:Agricultural Robot under Solar Panels for Sowing, Pruning, and Harvesting in a Synecoculture Environment
(1)これまでの研究で分かっていたこと(科学史的・歴史的な背景など)
近年、人類の喫緊の課題として気候変動があり、カーボンニュートラルへの転換が求められています。2019年に政府間組織IPCCがまとめた土地関係特別報告書によると、近年の人為起源の温室効果ガスの排出源割合のうち、農業や林業・畜産業を含めた土地利用による排出量が全体の約30%を占めており、従来の農法の再考の重要性が指摘されています。
ソニー CSLでは、これまで行われていた単一作物を集中して育てる農業に対して、耕起、施肥、農薬散布を行わず、生物多様性を高度に増進した拡張生態系を構築して食料生産を行う協生農法®*1を提案しています。協生農法では農地に適さない乾燥地帯のような従来の農法が適用できない土地であっても、段階的に生態系を構築し緑化しながら食料生産を行うことができます。ただし、協生農法を従来の農法が適用できない土地で行う場合には、協生農法導入初期の未熟な生態系を日光や風雨から保護するため、事前に低木などを植え、半日陰を形成した上での農法開始が必要となります。
サステナジーは「エネルギーで世界を持続可能にする」を経営理念に、これまで国内で大規模営農型太陽光発電(ソーラーシェアリング)を含む太陽光発電事業の開発と運営を行ってきました。同社は、多くの太陽光発電所のソーラーパネル下のスペースが利用されていないことに着目し、ソーラーパネル下にできる半日陰にて、ソニー CSLが提案する協生農法を行うことができれば、劣化した土壌を回復し、緑化・農地化することで、同じ土地で食料生産と再生可能エネルギーによる電気エネルギー生産を両立できると考えました。
しかし、協生農法では生育時期や生育速度の異なる複数種の植物を同じ土地で混生密生させるため、従来農法に比べ、時期を問わず種植え・雑草剪定・収穫といった複数の作業が必要となります。ところが、既存の農業機械や農業ロボットは従来の農法を対象に開発されており、複数作業を連続的に実行できるロボットはこれまで開発されておりませんでした。そのため、多種類の植物が密に混生する協生農法は基本的に人の手で行うしか採る術がなく、広範囲な農地を対象に実施することは困難でした。
(2)今回の研究で新たに実現しようとしたこと、明らかになったこと
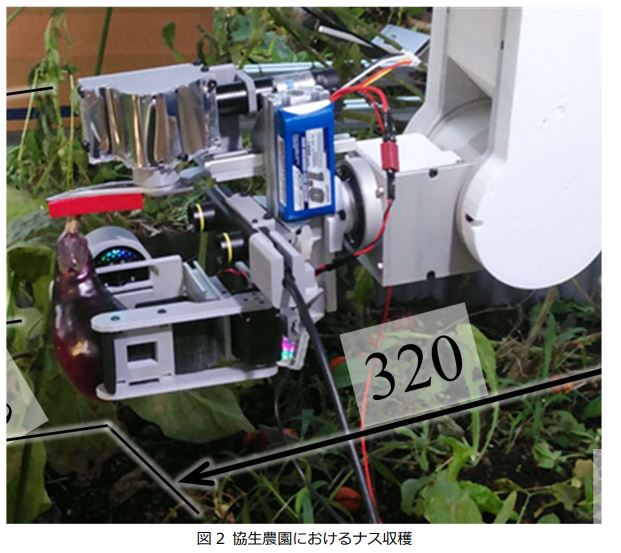
植物が混生密生する農地環境において移動および種植え・雑草剪定・収穫の作業(以下、3作業)が可能で遠隔操縦出来るロボット「SynRobo(シンロボ)(Synは人と共にという意) 」を開発しました(図1)、(図2)。
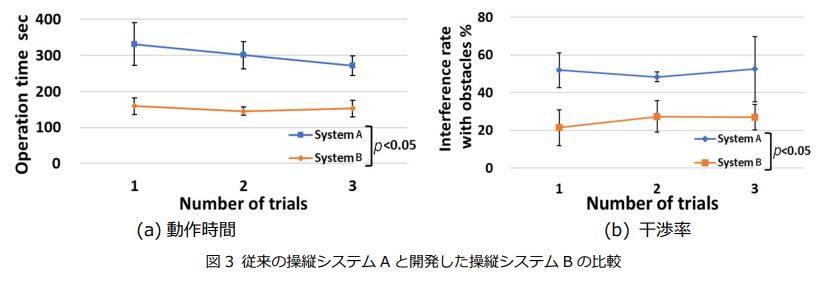
3作業を行うためには、それぞれの機能を実現する機構はもちろん、重量のある作物の運搬や種植えのための地面への穴あけなど、大きな力も要します。また、様々な植物が密生する農場では、ロボットとの不要な接触による植物の損傷は、生育不良や収穫物の価値低下につながります。そこで、様々な作業を行うためのパワーと機能を持ちながら、小型で環境との接触を少なくする操縦型農業ロボットの開発を目指しました。また、今回新たに開発した操縦システムを用いると、従来の操縦システムと比較して、3タスク連続動作において、動作時間の49%削減、障害物との干渉率の50%削減を達成しました。
(3)そのために新しく開発した手法
ロボットには、前後左右方向に移動しつつ伸縮する作業アームを備え、各作業に雑草剪定用のハサミ機構、収穫物の把持と切断の両方を行う収穫用機構を開発しました。作業に合わせてそれらの作業ツールを使い分けることで、それぞれの農作業を実行可能とし、別作業時には邪魔にならない構造としました。種植えでは、植物の種類ごとに形状や大きさの違う種子を同じ機構で扱うため、1粒ずつの種子を事前に土でコーティングした“種子団子”を植える機構を開発しました。さらに、3作業を行うためのロボットの操作系についても開発を進め、ツール位置と操縦者視点を一致させる操縦システム、指定した位置への自動播種機能、初心者も操縦を容易に理解できるメニューインターフェースによるタスク切り替えを実装しました。また、作業アーム先端の視点に360°カメラを採用し、植物が入り組んだ中でも作業地点周囲の環境を広範囲に認識できるようにしました(図4)。

(4)研究の波及効果や社会的影響
本研究は、複数種の植物が混生密生する環境でも使用可能な農作業ロボットを開発しました。目的である協生農法だけでなく、一般的な農業においても、育てる植物ごとに作業ツール部のみ変更すればよいため、同じロボットを広く使用できます。また、複雑な環境でも使用できる分、一般農法においても育てる植物同士の距離を近くすることができるようになり、単位面積あたりの収穫量向上や余計な移動が減ることによる作業効率向上への波及も期待できます。また、様々な環境で操縦による農業運用実績が蓄積されれば、それらのデータから学習することで農作業の自動化も可能となります。既存農法が実施されていない耕作放棄地や砂漠化地域などでもロボットの支援により農業ができるようになれば、協生農法を地球規模で進めることで、人類の抱える気候やエネルギーといった様々な問題を解決できると期待しています。
(5)今後の課題
今後、農業ロボットの自律化・実用化・大規模化を目指して、さらに研究を進めていきます。そのためには、環境の自動認識と組み合わせた作業自動化・作業ツールの自動交換、夜間も含めた長時間の作業に対するロボットの堅牢性の向上、全体の作業時間と製造・運用コストの低減を進めます。さらに研究開発を進めるとともに、協生農法が生物多様性や緑化に与える効果を大規模に検証するため、サステナジー株式会社は日本国内の耕作放棄地やケニアなどの砂漠化地域での本プロジェクトの事業化の準備を進めています。これらにより、SDGs17の目標にも掲げられている地球生態系の回復や気候変動防止に寄与する食料生産、さらに再生可能エネルギー生産によるカーボンニュートラル社会実現に向けた社会実装・事業化に発展させていく予定です。
(6)各機関の役割
早稲田大学
ロボットの研究開発
サステナジー株式会社
ソーラーパネル下の協生農法農地の運営、プロジェクトの事業化
株式会社ソニーコンピュータサイエンス研究所
協生農法のノウハウ伝達、ロボットによる管理課題の抽出
(7)研究者のコメント
早大は、故加藤一郎教授*2がヒト形ロボットの研究開発を始めて以来、世界初の本格的人間形知能ロボットWABOT-1や2足歩行ロボットWABIAN-2などさまざまなロボットを開発し、世界のロボット研究をリードしてきました。
喫緊の課題であるカーボンニュートラル社会の実現に向けた新しい農業を現実にするために、複雑な環境でも複数の農作業を1台で行えるロボットを開発しました。このロボットを一刻も早く社会で使いながら、さらにより広く世界に貢献するためにも、これからも様々な方にプロジェクトに加わっていただきながら、研究開発と実用化を進めて参ります。
(8)用語解説
※1 協生農法
ソニーコンピュータサイエンス研究所の舩橋真俊が提唱している協生農法は、食料生産と生物多様性を両立することを目指した新たな農業の具体論です。すでに、アフリカのブルキナファソでは、伝統的な農業や過放牧による砂漠化のため放置されていた500 ㎡の乾燥地を利用して協生農法による約150種の在来種の栽培が2015年3月からスタートしました。協生農法により豊かな生態系を短期間で一気に立て直すことができ、2015年6月には初めての収穫を迎え、収穫物の高い品質が地元の市場で認められ通常の農産物の倍の値段で販売されました。
「協生農法」は(株)桜自然塾の登録商標です。
※2 加藤一郎教授
早稲田大学にてヒト形ロボットの研究開発を始め、1973年には世界初の本格的人間形知能ロボットWABOT-1を開発しました。WABOT-1は、人間とのコミュニケーションを簡単な日本語の会話で行い、対称物を認識し距離・方向を測定し、2足歩行によって移動し、触覚を有する両手で物体の把握・移動などの作業を行うことが可能なロボットです。
(9)論文情報
雑誌名:Agriculture
論文名:Agricultural Robot under Solar Panels for Sowing, Pruning, and Harvesting in a Synecoculture Environment
執筆者名(所属機関名):Takuya Otani*a、Akira Itoh*a、Hideki Mizukami*a、Masatsugu Murakami*a、Shunya Yoshida*a、Kota Terae*a、Taiga Tanaka*a、Koki Masaya*a、Shuntaro Aotake*a & b、Masatoshi Funabashi*b、Atsuo Takanishi*a
a…Waseda University、b…Sony CSL
掲載日時(日本時間):2022年12月21日(水)
掲載URL: https://www.mdpi.com/2077-0472/13/1/18
DOI: https://doi.org/10.3390/agriculture13010018